
Child Android Design
This project aims to build a child android “Affetto”, which has a child-like body in size, shape, softness, and expressiveness. Realizing several structures and functions for humanlike impression or behaviors … Continue Reading →
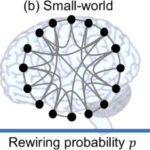
Complex Networks in a Brain
A brain is large-scaled networks comprising of neurons. A topology of these networks is not random but complex, i.e., it exhibits some kinds of complex networks. One of the most … Continue Reading →
Brain-Body Dynamics
Brains do not drive alone but emerge behavioral functions with bodies. Dynamical systems of the brain and body construct a coupling system, and we think that their interaction is important … Continue Reading →