計算機シミュレータやロボットを使って、人の脳神経の情報処理や認知発達のメカニズムを明らかにしようとする研究をしています。
脳神経シミュレーション
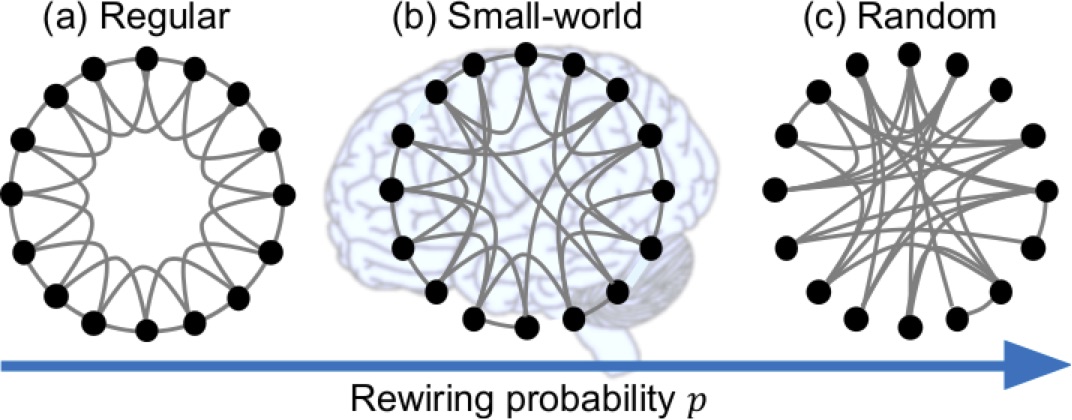
神経回路網における複雑ネットワーク性の役割の解明
脳は神経細胞で構成される大規模なネットワークです。そのネットワーク構造はランダムではなく、ある種の複雑ネットワーク性を有しています。その代表例がスモールワールド性です。しかし、その複雑ネットワーク性が神経回路網においてどのような情報処理に寄与しているかはよくわかっていません。この研究では、複雑ネットワーク性を有する神経ネットワークのシミュレーションを構成し、そのネットワーク上でどのように情報が流れ、どのような神経計算がなされるかを明らかにしようとしています。複雑ネットワーク性の役割が解明されることで,脳のような高度な情報処理を実現する人工知能の開発につながることが期待されます。
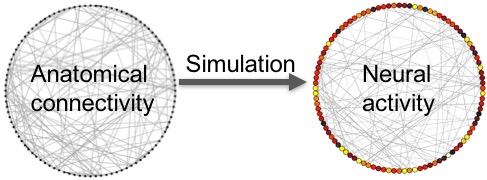
自閉スペクトラム症の脳の特異性の構成的理解
自閉スペクトラム症は神経発達症の一つです。多くの脳計測研究から、自閉スペクトラム症者の脳の構造や活動に、定型発達者とは異なる特異性があることが明らかになっていますが、その症状の神経メカニズムは未だに不明な点が多いです。この研究では、脳構造と脳活動がどのように関連し、自閉スペクトラム症の症状を引き起こすのかのメカニズムを、神経シミュレーションにより明らかにすることを目的にしています。自閉スペクトラム症に特異的な脳構造を持つ神経ネットワークがどのように活動し、それが外的な入力に対してどのように反応するかを調査します。将来的には、投薬や脳への電気的刺激による効果を予測するシミュレーションを開発することを目指します。
認知発達モデル
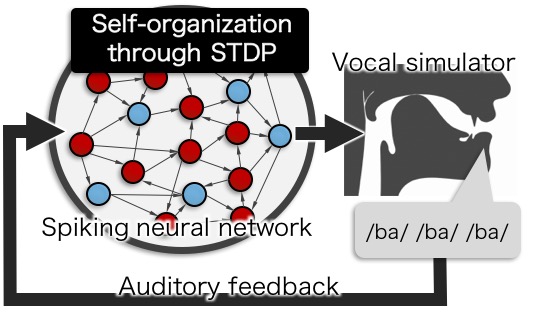
運動感覚野の自己組織化による規準喃語獲得モデル
人の脳の感覚運動皮質と呼ばれる領域には、人のある動きやある感覚に対して選択的に活動する神経細胞が存在します。その神経による身体表現は可塑的であり、特に乳児期に、自身の運動経験を通して獲得されると考えられています。本研究では、乳児の運動経験として喃語(バブリング)を取り上げ、自身の発声の音声フィードバックが入力される神経回路網を設計し、その神経回路の可塑性に基づく自己組織化により,どのように自身の調音に関する神経表現が獲得され,さらにその表現から,どのような身体的挙動が現れるかを調べています。本来連続的な身体運動や神経活動から、ある種の離散的な表現が獲得される過程を明らかにすることは、人の言語獲得の問題につながる重要な課題であると考えています。
ICDL-Epirob2017,ICDL-Epirob2018
統計的機械学習を用いた幼児の言語発達モデル
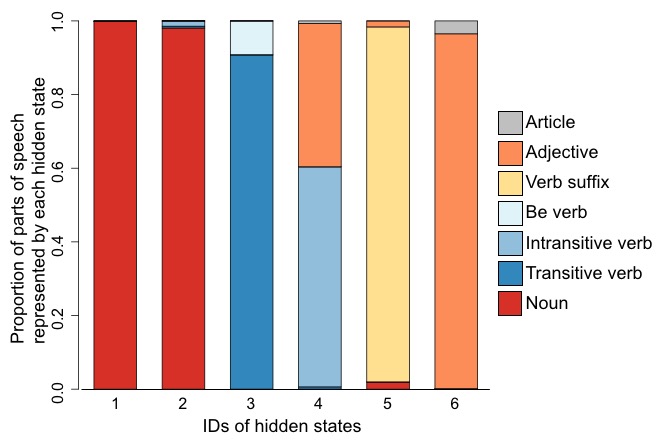
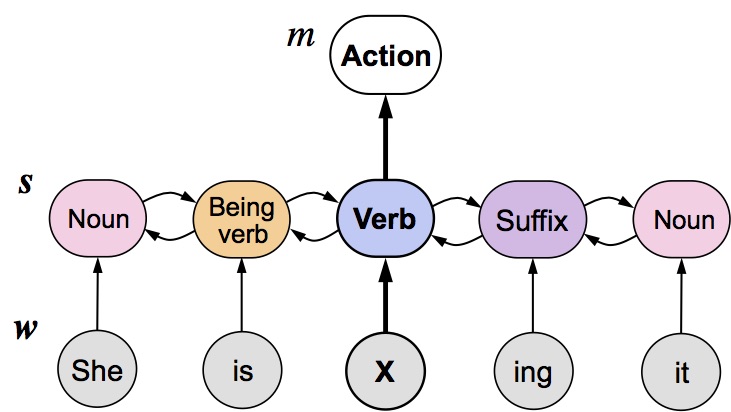
幼児は文法を明に教わらないにもかかわらず、名詞や動詞の文法カテゴリやカテゴリ間の遷移規則を獲得します。この学習を隠れマルコフモデルという統計的機械学習を用いてモデル化します。このモデルに設定するカテゴリ数が少ない場合は、曖昧な文法カテゴリしか獲得できませんが、十分に大きなカテゴリ数になると、精緻な文法カテゴリとその遷移規則が学習できます。このカテゴリ数の増加が幼児の文法発達に対応するという仮説をシミュレーションにより検証しています。その結果、幼児の文法的知識に基づく指示対象推定や、接尾辞や助詞の特徴的な誤りの発達的変化を再現できることがわかりました。
感覚運動経験により獲得される自他認知モデル
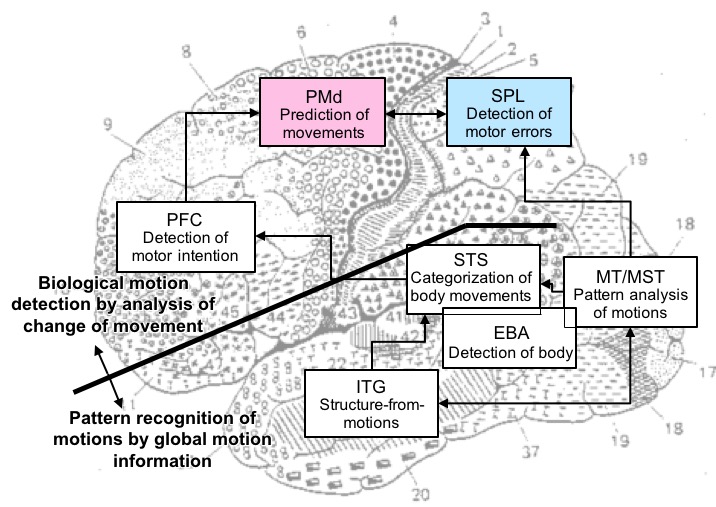
乳児は運動経験を通して、自己の運動とその結果の感覚情報を対応づけ、自身の身体表現を獲得すると考えられています。この研究では、その自己の身体表現に基づいて、他者の運動を理解するという身体性認知の仮説をシミュレーションやロボットを用いて検証しています。例えば、自身の運動軌道の特徴的ななめらかさの表現を学習し、観察した運動がその表現に当てはまるかどうかで,その行為主の属性(生物的な運動か、機械的な運動か)を判断できます。また、獲得した自身の感覚運動の連合関係を他者運動へ適用することで,その運動を想起(模倣)できるようになります。
人工物に対する責任帰属と法意識
将来、高度な自律ロボットや人工知能が人と共に作業したり,意思決定したりすることが予想されます。このとき人は、その失敗を自分とロボットのどちらのせいだと感じるのでしょうか。または、その成功をどちらのおかげだと思うのでしょうか。また,相手が人である場合と、ロボットなどの人工物である場合とで、この責任帰属は異なるのでしょうか。人を対象としたヒューマンロボットインタラクション実験の結果から、相手がどのような心を持っていると思っているのか、という心の知覚と、責任感が関連することがわかりつつあります。このようなデータをもとに、法学者らと共同で、将来のロボットや人工知能に関する法制度や研究者倫理を検討していきます。

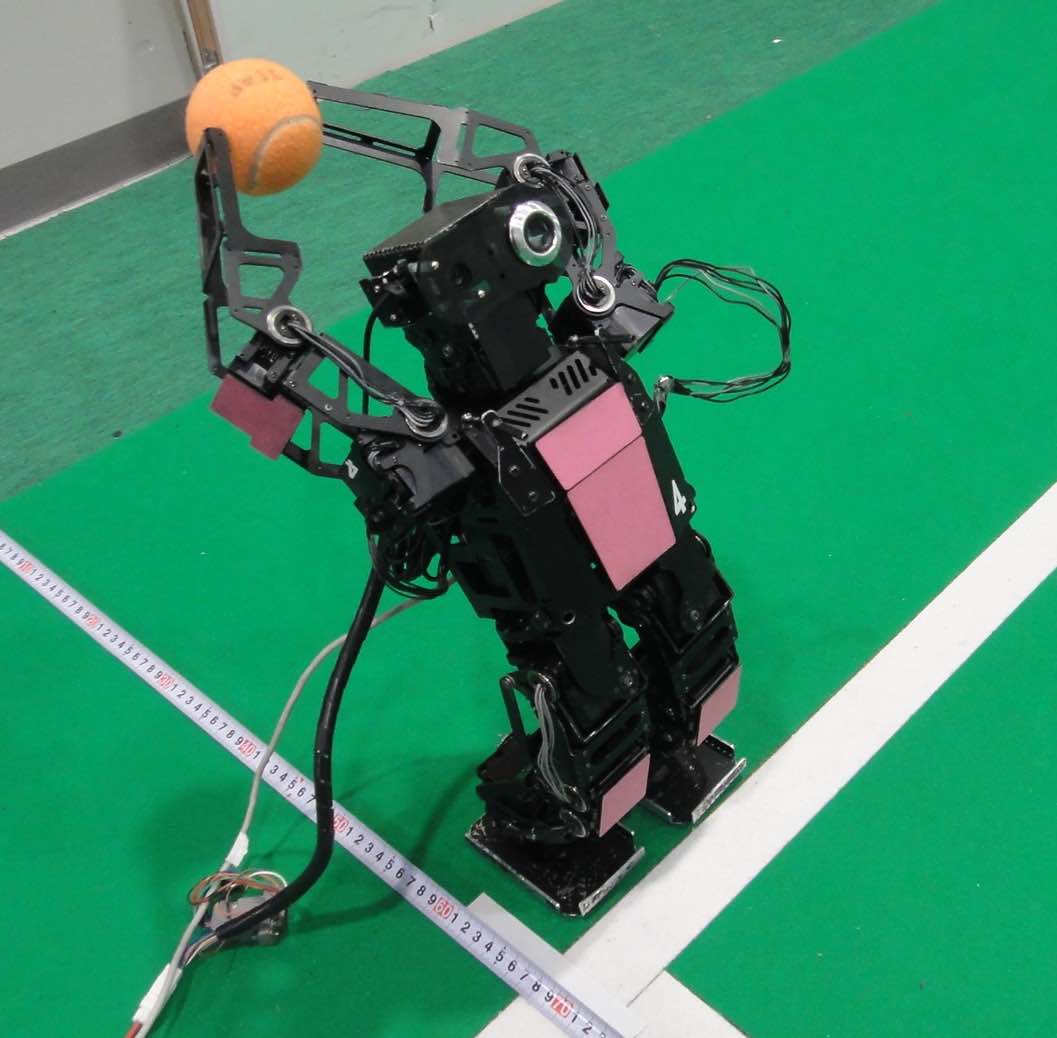
ロボカップ サッカー ヒューマノイドリーグ
ロボットでのサッカー競技会であるロボカップへ参加しています。ロボカップ ヒューマノイドリーグでは、ロボットは外野からコントロールされるのではなく、内部に搭載されたコンピュータにより完全に自律的に、カメラ画像の処理、意思決定、行動の実行をしなければなりません。この取り組みを通して、自己位置推定法や、複数エージェントの協調動作の計画法、ロボット動作の最適化手法などの研究をしています。2017年ロボカップ世界大会 標準プラットフォームリーグに、チーム名JoiTech-SPLで参加予定です。